






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
写字机器人伪造签名字迹的鉴别
[朱明新 , 李梦婕, 许润杰]
, 李梦婕, 许润杰]
, 李梦婕, 许润杰]
|
|


第一作者简介:朱明新,男,江西南昌人,学士,中级警务技术任职资格,研究方向为文件检验。E-mail: zhumingxin87@163.com
目的 通过实验研究使用写字机器人伪造的签名字迹特征,减小文件检验鉴定中的错判风险。方法 以真实书写字迹为模板、使用市面上主流款式的写字机器人执不同种类书写笔进行书写,通过直接观察、显微观察、反射变换成像(RTI)方法观察等方式比对手写字迹和机器人书写字迹的差异,归纳写字机器人伪造字迹的主要特征,总结出有效的检验鉴别方法。结果 通过研究发现写字机器人伪造签名笔迹的特点主要有起收笔为顿压笔,笔画出现细微的抖动歪曲现象,整体笔画笔压均匀,运笔生硬无笔势等。结论 目前写字机器人伪造签名字迹与真实手写字迹还有一定差异,使用反射变换成像(RTI)方法观察能达到较好的检验效果。
Objective With advent of the writing robot that is able to imitate human handwriting and personal signature, the writing-robot-forged signature is sometimes encountered for forensic identification. The characteristics of signature forged from writing robot are different from those of the real man-made, thus capable of building up a creditable foundation for the involving identification. Here, the experimental research was to conduct on the characteristics of writing-robot-forged signature so as to help reduce the misjudgment in the relevant document examination and identification.Methods Taken of the real man-made handwriting as template, one mainstream market-sold writing robot was selected to imitate the template to produce its writing with different pens that were also used by people to write the same words as those made with the writing robot. The comparison was carried out between the two kinds of written words through direct naked-eye and microscopic observation plus the reflection transformation imaging (RTI) scrutiny. From the main differences summarized between the two kinds of handwriting, an effective examination and identification into document was to sum up.Results The characteristics of writing-robot-forged handwriting were mainly shown as: 1. The combinatorial characteristics of single words are highly consistent. 2. The stroke order of a single word is exactly same. 3. The signature is almost reproduced with high fidelity. 4. The starting and ending strokes keep a constant pressure. 5. Some strokes will appear distorted and shaken. 6. The overall strokes are even. 7. The movement of the used pen is rigid and less of gesture.Conclusions There is a significant difference between the writing-robot-forged handwriting and the real man-made. Reflection transformation imaging (RTI) should be used for observation to achieve a better identification effect.
随着科技发展, 近年来一种号称能仿手写、仿个人笔迹的写字机器人(又称写字机、绘图仪等)走进大众视野。机器执笔完成书写工作, 使人们脱离重复性文字书写的重担, 也产生了一定隐患。目前市面上出现的写字机器人大多是以Arduino为开发平台、采用笛卡尔坐标结构的框架式数控绘画写字机器人。这类写字机器人实际上与激光雕刻机、3D打印机关系紧密, 在结构、原理和编程控制上有诸多相通之处, 原本是数控机床(computerized numerical control, CNC)爱好者探索研究的产物。在经过各种改进后, 当下最主流的是一种基于Grbl固件并采用coreXY结构的写字绘图机, 其特点是开源程度高、开发成本低、结构稳固、精度相对较高[1, 2, 3]。由于技术较为成熟、制作门槛低, 写字机器人因有关新闻曝光后, 网上相互仿制的写字机器人泛滥, 仅在零件用料、传动布线上存在差异, 大体趋同, 但尚未出现被广泛认可的品牌。
机器人技术在手写技术方面取得了长足的进步, 这给不法分子利用写字机器人伪造签名字迹提供了便利的条件。写字机器人伪造签名字迹的特点与复印、打印、挖补剪贴等伪造方式不同, 具有笔压特征。众所周知, 签名字迹字数少, 可摹仿性强, 故写字机器人伪造签名字迹具有很强的迷惑性, 会对文件检验鉴定造成一定错判风险。本文针对这种伪造签名字迹的手段, 采用实验分析的方法, 系统性地总结出写字机器人伪造签名字迹的特征, 研究对其有效的检验方法, 期望对文件检验实践具有一定的指导作用。
笨狼科技仿生写字机(铝合金材料, 尺寸为390 mm × 450 mm), 蔡司V8体视显微镜, VSC8000文检仪, 反射变换成像(reflection transformation ima-ging, RTI)相关设备, 百乐牌钢笔, 晨光中性笔, 施耐德圆珠笔, officemate办公伙伴A4打印纸, 得力牌活页纸。
通过使用电脑版奎享字体软件以正常签名字迹扫描图片为参照背景描摹制作出伪造签名字迹专有字体库。在两种纸张上分别使用三种不同的笔通过写字机器人书写制作签名字迹样本共6份。在两种纸张上分别使用三种不同的笔由实验人书写制作样本共6份。
1.3.1 直观比较检验法
将实验样本放在VSC8000文检仪内, 调整合适倍率和光源, 进行观察检验。
1.3.2 显微放大检验法
将实验样本逐一放在蔡司V8体视显微镜载物台上, 调整合适的倍率, 观察寻找细节特征。
1.3.3 反射变换成像检验法
采用反射变换成像技术, 对实验样本进行处理, 获取实验样本的法线图。
2.1.1 单字组合特征高度符合
写字机器人伪造签名字迹与人类套摹伪造签名字迹有相同的部分, 两种方法都有描摹的过程, 只不过写字机器人伪造笔迹是通过计算机对原始笔迹文件进行处理后进行描摹。所以写字机器人伪造的签名字迹与被伪造字迹在单字组合特征上高度符合(见图1)。
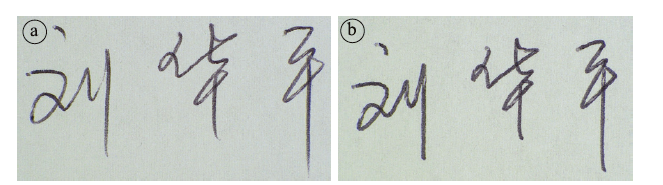 | 图1 单字组合特征比对图(a:正常书写字迹; b:写字机器人伪造签名字迹)Fig.1 Comparison between the combinatorial features of single word made from (a) normal handwriting and (b) writing robot |
2.1.2 单字笔顺特征基本符合
经检验发现, 写字机器人伪造的签名字迹与被伪造的手写正常书写签名字迹在笔顺特征上基本符合。因为写字机器人伪造字迹是通过制作矢量字体来实现的, 如果按照被伪造的字迹笔顺进行制作就可以实现相同的笔顺特征。
2.1.3 写字机器人书写的签名字迹精准再现
利用同一伪造笔迹字库伪造出的签名字迹, 其笔迹特征均能精准重复出现, 例如在观察书写机器人圆珠笔签名笔迹特征时, 发现两次书写的字迹在对应笔画的笔痕均能精准地复制(见图2)。众所周知, 人类的书写活动不可能完全再现, 不可能像写字机器人的字迹那样相同字特征高精度地再现[4]。
 | 图2 写字机器人两次圆珠笔签名字迹放大比对Fig.2 Comparison between the magnified handwriting produced from the writing robot to write twice with ballpoint pen |
2.1.4 起收笔均为顿压笔
经过检验发现, 写字机器人伪造签名字迹的起收笔均为顿压笔。而手写正常书写的签名字迹起收笔特征反映自然, 特别是在收笔特征上, 能够反映出收笔的力度变化(见图3)。
 | 图3 起收笔特征RTI处理效果对比图(a.写字机器人圆珠笔字迹; b.写字机器人钢笔字迹; c.写字机器人中性笔字迹; d.手写圆珠笔字迹; e.手写钢笔字迹; f.手写中性笔字迹)Fig.3 Comparison of characteristics between the starting/ending strokes processed with RTI into the Chinese word “ 刘” written by writing robot using (a/b/c) ballpoint pen/pen/neutral pen and manual acts with (d/e/f) ballpoint pen/pen/neutral pen |
2.1.5 个别笔画会出现歪曲抖动
在检验中发现, 写字机器人伪造签名字迹在个别笔画上会出现歪曲抖动的情况(见图4)。而手写正常签名字迹运笔流畅。写字机器人伪造签名字迹的抖动歪曲特征与普通摹仿笔迹抖动歪曲特征相比抖动歪曲幅度小, 分布广。写字机器人伪造签名笔迹在个别笔画出现歪曲抖动的主要原因:一方面是写字机器人书写过程中同步带抖动, 另一方面是在制作伪造签名字体库时手动描摹出现抖动。
 | 图4 写字机器人中性笔伪造签名字迹放大图Fig.4 Enlarging the signature forged with writing robot using neutral gel pen to write |
2.1.6 笔画呈均匀的笔压
通过反射变换成像RTI技术进行检验, 发现写字机器人伪造的签名字迹各笔画呈均匀的笔压, 而手写正常签名字迹笔压变化自然, 反映出轻重疾徐的变化(见图5)。RTI技术通过数码相机捕捉物体表面的形状与颜色, 建成相关的模型, 通过记录和处理被摄物体的颜色和表面纹理信息, 获得的影像比单张摄影图信息更为丰富[5-6]。
 | 图5 笔压分布特征RTI法线图比对(a:写字机器人圆珠笔伪造签名字迹; b:手写圆珠笔正常签名字迹; c:写字机器人中性笔伪造签名字迹; d:手写中性笔正常签名字迹)Fig.5 Comparison of neb-pressure changing in the course of writing the signature with ballpoint pen (neutral pen): a(c) writing robot /b(d) manual operation |
2.1.7 运笔生硬、缺少笔势
在检验中发现, 写字机器人利用中性笔、圆珠笔伪造的签名字迹笔画粗细基本不变, 整体运笔生硬、缺少笔势。而手写正常签名字迹笔画随着笔力大小有粗细的变化, 运笔自然流畅(见图6)。
 | 图6 笔画粗细变化比对图(a.写字机器人中性笔字迹; b.手写中性笔正常字迹; c.写字机器人圆珠笔字迹; d.手写圆珠笔正常字迹)Fig.6 Comparison of stroke-width changing in the course of writing the Chines word of “ 刘” with neutral pen/ballpoint pen: a(c)writing robot/b(d)manual operation |
在此次研究中, 笔者发现在检验写字机器人伪造签名字迹中反射变换成像技术发挥了重要作用, 可以将整体笔画笔力分布直观反映出来, 充分获取到笔压信息[5, 6]。特别是在检验写字机器人利用钢笔进行伪造签名时作用更加明显。写字机器人利用钢笔伪造的签名字迹也出现了部分笔画变细的情况, 从表象上观察可能会误以为有笔力变化。经过反射变换成像技术进行处理后进行观察, 可以清晰地发现字迹整体笔压大小并没有变化, 笔力分布均匀, 与利用圆珠笔、中性笔书写字迹反映一致。笔者分析, 钢笔字迹出现笔画变细的原因是写字机器人执笔角度固定, 笔尖不能随着运笔方向调整方向, 致使墨迹不均匀(见图7)。针对写字机器人伪造签名笔迹的检验, 建议专业人员首先注意观察检材字迹与样本字迹是否存在外形轮廓高度一致的情况; 其次使用放大的方法观察字迹笔画是否出现弯曲抖动, 起收笔是否均为顿压笔; 最后使用反射变换成像技术对字迹进行检验, 分析字迹的笔力变化情况。
 | 图7 RTI技术检验写字机器人钢笔签名字迹效果图(a:写字机器人钢笔字迹; b:写字机器人钢笔字迹RTI法线图; c:手写钢笔正常字迹; d:手写钢笔正常字迹RTI法线图)Fig.7 RTI-tested effect of the pen-made signature from the writing robot’ s (or the manual’ s): handwriting a(or c)/neb pressure reflected with RTI b(or d) |
通过本次实验研究, 发现写字机器人伪造签名字迹与手写正常签名字迹存在明显差异。写字机器人伪造签名笔迹的特点主要表现在以下几个方面:一是单字组合特征与被伪造签名高度符合。二是单字笔顺特征可以实现与被伪造签名完全相同。三是利用同一伪造签名字体库写出的签名字迹可高精度再现。四是起收笔均为顿压笔。五是个别笔画会出现歪曲抖动。六是整体笔画呈均匀笔压。七是整体运笔生硬、缺少笔势。鉴定人在实际检验中应当注意发现是否存在上述写字机器人伪造签名笔迹的特点, 以免造成错判。针对写字机器人伪造签名字迹的检验可以通过以下几个方面进行:一是通过直观比对检验单字组合等特征。二是通过放大比对检验字迹的起收笔、行笔等细节特征。三是利用反射变换成像技术检验字迹的笔力特征。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|